
 ENG
ENGКомпьютерная диагностика АКП на автомобиле. Часть 4.
Автомобильный технический эксперт
Рассмотрим датчики, относящиеся к информационному интерфейсу. Как уже указывалось ранее, все датчики, применяемые в информационном интерфейсе, преобразуют какую-либо физическую величину в пропорциональное напряжение. Это связано с тем, что модуль управления АКП работает только с входным напряжением. И потому в основном это резистивные датчики, хотя все чаще встречаются и параметрические.
Резистивные датчики – это датчики, принцип действия которых основан на изменении их активного сопротивления. К ним относятся:
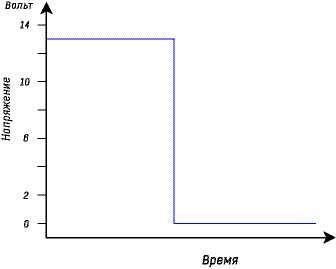
- Контактные – простейший вид резисторных датчиков, преобразующих перемещение первичного элемента в скачкообразное изменение сопротивления электрической цепи. Выходной величиной такого датчика является мгновенное изменение напряжения на одном или нескольких контактах. К ним относятся путевые и концевые выключатели и так называемые контактные датчики для измерения определенных значений физических величин – например, температуры, давления и т. д.

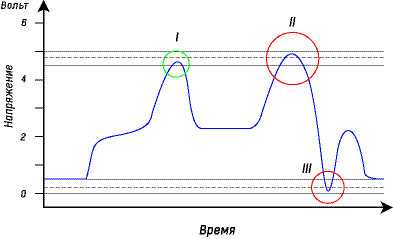
- Реостатные – эти датчики представляют собой резистор с изменяющимся активным сопротивлением. Подвижный контакт механически связан с объектом, угловое или линейное перемещение которого необходимо преобразовать. Выходной величиной такого датчика является пропорциональное (непрерывное или ступенчатое) изменение напряжения между подвижным и одним из неподвижных контактов (илл. 2). К ним относятся датчики перемещения, положения и т. п.

- Терморезисторные – датчики, активное сопротивление которых зависит от температуры. Выходной величиной такого датчика является пропорциональное непрерывное изменение напряжения на одном из контактов.
Параметрические датчики – это датчики, принцип действия которых основан на преобразовании физической величины в изменение какого-либо электрического параметра, например, тока, потенциала, заряда и т. п. Поэтому параметрические датчики требуют применения специальных измерительных цепей с питанием постоянным током. К таким датчикам относятся:
- Пьезоэлектрические – датчики, построенные на эффекте образования электрических зарядов в материале диэлектрика при приложении к нему механической силы. Выходной величиной таких датчиков является пропорциональное непрерывное изменение напряжения на одном контакте. К ним относятся датчики давления.
Сигнал со всех вышеперечисленных датчиков обычно лежит в диапазоне напряжения от 0 до 5 В и крайне редко до 12 В. Это позволяет модулю управления, обрабатывая сигналы от датчиков, осуществлять их контроль. Прежде всего контроль выхода сигнала за пределы допустимого диапазона. На илл. 2 представлен график изменения напряжения датчика дроссельной заслонки с механическим приводом от педали акселератора (применяется один датчик). Нормальный сигнал этого датчика лежит в диапазоне от 0,5 В (полностью закрытая дроссельная заслонка) до 4,5 В (полностью открытая дроссельная заслонка). В модуль заложены контрольные значения этого сигнала. Если сигнал ниже 0,2 В, то модуль определяет его как некорректный низкий сигнал, а если больше 4,8 В – то как некорректный высокий сигнал. При электронной связи педали акселератора с дроссельной заслонкой модуль может осуществлять контроль сигнала внутри диапазона работы датчика, так как в этом случае в целях безопасности используют сдвоенный датчик (два датчика) дроссельной заслонки с противоположными характеристиками (илл. 3):
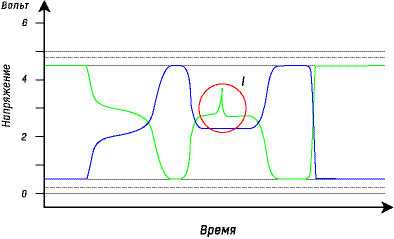
 Математическое сложение сигналов этого датчика при правильной его работе всегда должно соответствовать определенной величине. Отклонение величины от заданной указывает о некорректном сигнале датчика внутри диапазона его работы. Также возможна оценка сигнала внутри диапазона работы датчика путем сравнения с показаниями других датчиков либо в определенном режиме работы агрегата. Например, в первом случае температура трансмиссионной жидкости в АКП оценивается по значению температуры охлаждающей жидкости двигателя, а во втором – значение давления в магистрали АКП при включенном зажигании, но не заведенном двигателе.
Математическое сложение сигналов этого датчика при правильной его работе всегда должно соответствовать определенной величине. Отклонение величины от заданной указывает о некорректном сигнале датчика внутри диапазона его работы. Также возможна оценка сигнала внутри диапазона работы датчика путем сравнения с показаниями других датчиков либо в определенном режиме работы агрегата. Например, в первом случае температура трансмиссионной жидкости в АКП оценивается по значению температуры охлаждающей жидкости двигателя, а во втором – значение давления в магистрали АКП при включенном зажигании, но не заведенном двигателе.
Особым классом являются датчики частоты вращения различных валов и элементов АКП. Для обеспечения их работы необходим индуктор, имеющий совокупность отметок в виде выступов (пазов) зубчатого колеса, отверстий, углублений и т. п., которые могут быть «считаны» датчиком и преобразованы в изменения его электрического выходного сигнала. Сигнал с этих датчиков зависит от скорости прохождения отметок, изготовленных из ферромагнитного материала, мимо сердечника датчика, зазора между датчиком и этими отметками, а также от величины питающего напряжения, если датчик является активным. Эти датчики бывают:
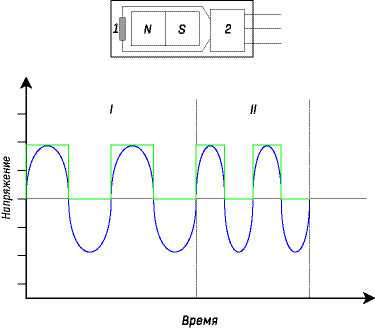
- Индукционными – принцип их действия основан на законе электромагнитной индукции. Выходным сигналом таких датчиков является ЭДС (электродвижущая сила), которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки датчика. Этот датчик не активный, то есть для его работы не требуется питания. Илл.4:


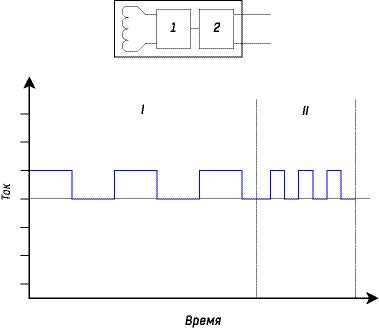
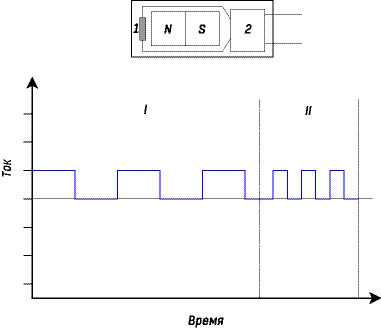
- Индуктивными – работающими на принципе вихревых токов. Выходным сигналом этих датчиков являются импульсы тока в цепи питания датчика, пропорциональные скорости прохождения элементов. Этот датчик активный, то есть требует питающего напряжения. Илл. 5:

- Электромагнитными (Холла) – принцип их действия основан на эффекте Холла. Выходным сигналом этих датчиков является напряжение Холла, которое прямо пропорционально приложенному магнитному полю и питающему напряжению. Этот датчик активный, то есть требует питающего напряжения. Илл. 6:

- Магниточувствительными (Холла) – принцип действия которых также основан на эффекте Холла. Выходным сигналом таких датчиков являются импульсы тока в цепи питания датчика, пропорциональные скорости прохождения элементов (илл. 7). Этот датчик активный, то есть требует питающего напряжения. Илл. 7:
Таким образом, были рассмотрены все типы датчиков, применяемых в информационном интерфейсе модуля управления современной АКП. Дополнительно необходимо отметить, что модуль производит опрос данных с датчиков дискретно, с определенной частотой. Причем одни датчики он опрашивает чаще, а другие реже. К примеру, датчик температуры жидкости опрашивается каждые 0,03 с (30 миллисекунд), а датчик частоты вращения – каждые 0,00017 с (0,17 миллисекунд). Для оценки качества и правильности сигнала с датчиков используют цифровые осциллографы. Производители в технической документации все чаще предоставляют информацию о форме сигнала с того или иного датчика при его определенных режимах работы. Что позволяет при диагностике выявить некорректность сигнала с этого датчика, а вот причину некорректности должен будет определить специалист. Самый простой способ проверки функционирования любого датчика является метод его замены на новый. Однако, если после замены датчика его сигнал все равно окажется некорректным, причиной может быть как электрическая проводка датчика, соединяющая его с модулем, так и проводка внутри модуля до управляющего устройства (драйвера) датчика. И последнее, что может быть неисправно, это сам управляющий модуль как результат физического или программного повреждения. В последнем случае устранить неисправность может помочь перепрограммирование модуля управления АКП.